Using Robot Soccer Balls with the Seeker V2.
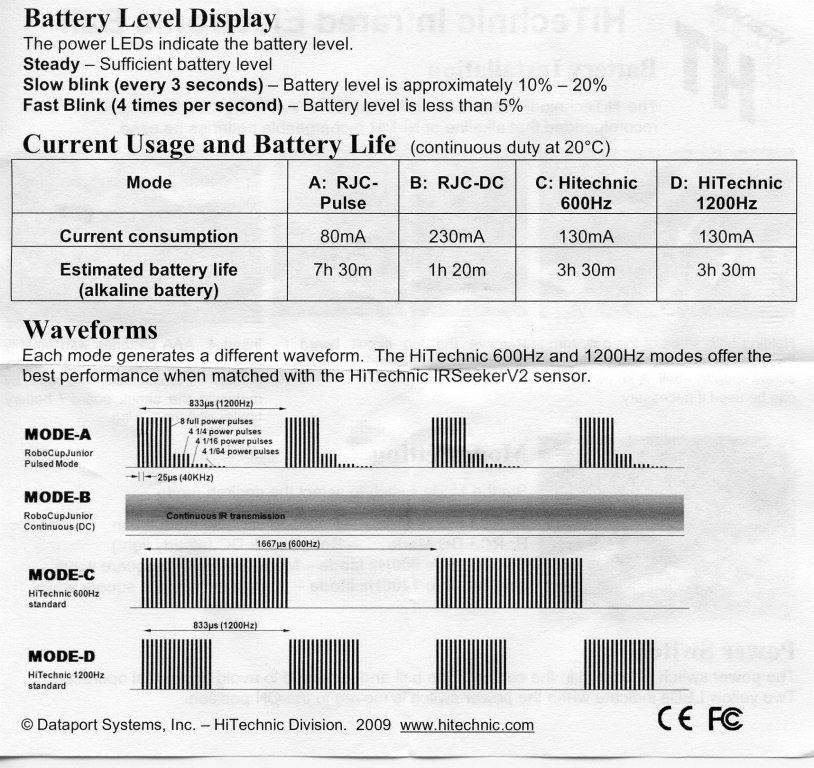
The HiTechnic RCJ-05 Robot Soccer Ball can operate in any of four user-selectable modes; Mode-A, Mode-B, Mode-C and Mode-D. In case you have lost the paper details that came with your HiTechnic Soccer ball, HiTechnic have given me permission to reproduce a scan of their RCJ-05 information sheet; see below.
The HiTechnic RCJ-05 Soccer Ball modes are chosen by unscrewing the top of the ball and adjusting the MODE SWITCH, see diagram below.
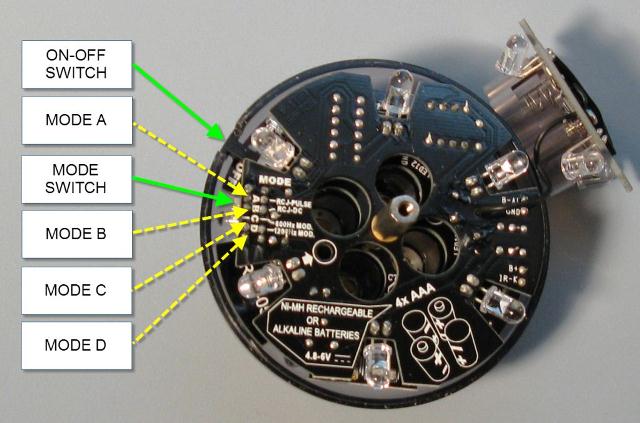
A demonstration of unscrewing the top of the Soccer Ball can be seen in the "Change Batteries" [video Big, Small].
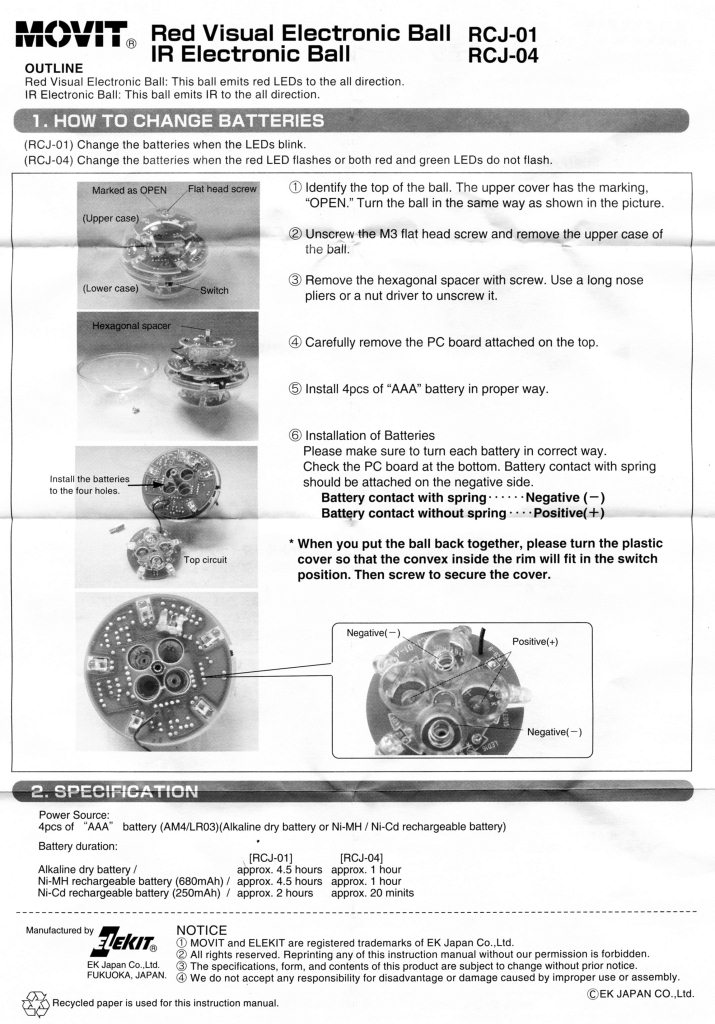
The older HiTechnic soccer balls (RCJ-01 to RCJ-04) can only operate in one mode (equivalent to HiTechnic mode-B). To assist purchasers who have lost the specification sheet that comes with this ball, a scan is shown towards the end of this web page.
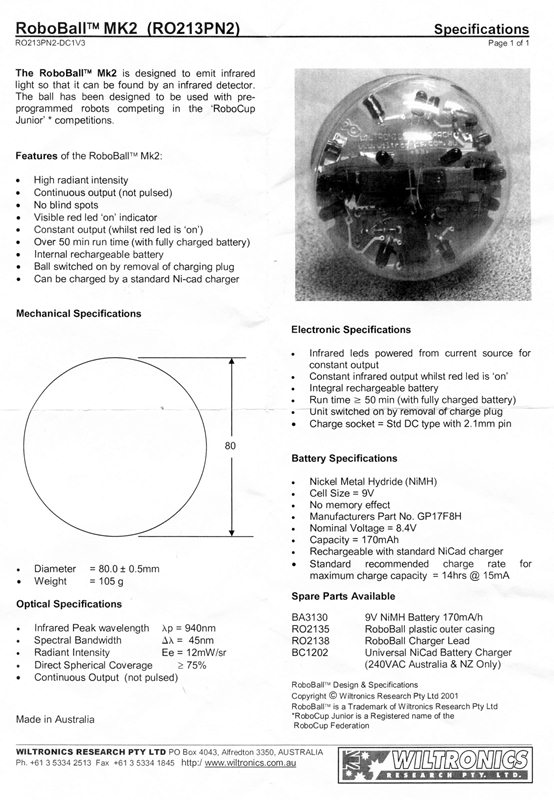
The Mark 2 Wiltronics Soccer ball can only operate in one mode (equivalent to HiTechnic mode-B). To assist purchasers who have lost the specification sheet that comes with this ball, a scan is shown at the bottom of this web page.
Using the HiTechnic RCJ-05 (Mode-B), Wiltronics, or older HiTechnic soccer balls.
A continuous (non-pulsed) output from these balls was the official mode for GEN II soccer until 2009. It was the official mode used in WRO GEN II Soccer in 2010, but for 2011 the WRO have replaced it with a HiTechnic RCJ-05 mode D pulsed ball. These un-pulsed balls operate in the official mode for 2011 RoboCup Junior Australia Novice League Soccer (see rules here). In mode-B the HiTechnic RCJ-05 soccer ball imitates the Wiltronics and older HiTechnic soccer balls.
A soccer-playing robot finds a robot soccer ball by detecting the invisible (to human eyes) infra-red light sent out by that robot soccer ball. The older HiTechnic RCJ-01 robot soccer ball, and the present Wiltronics robot soccer ball, both send out this infra-red light in a constant stream. The Mode-B option of the HiTechnic RCJ-05 soccer ball imitates these older balls, in that Mode-B also sends out infra-red light in a constant stream (see mode-B above).
The advantage of RCJ-05 Mode-B is that it allows the RCJ-05 to be interchangeable with the older HiTechnic RCJ-01 and Wiltronics balls. This can be useful when students are experimenting with Robot Soccer in a classroom.
The main disadvantage of using balls that send out a constant stream of infra-red light, is that robots looking for them can be much more easily distracted by random sources of heat around competition arenas. It is for this reason that they are no longer the preferred type of soccer ball for use in non-novice GEN II robot soccer tournaments. However they are still fine for use in classroom or home experiments with robot soccer.
When using the Wiltronics, RCJ-01 to RCJ-04 HiTechnic and RCJ-05 HiTechnic (mode-B) soccer ball, with a HiTechnic V2 Seeker, the Seeker NXT-G control panel option must be set to "DC".


Using the HiTechnic RCJ-05 Soccer Ball in Mode-A.
This was the official mode for the Australian RoboCup Junior GEN II robot soccer tournaments for 2010. It is the official 2011 mode for both RoboCup Junior Australian Open League Soccer and the New Zealand RoboCup Junior Soccer events.
The HiTechnic RCJ-05 soccer balls are supplied with Mode-A pre-set as the default option. When set into Mode-A, RCJ-05 soccer balls send out infra-red light in pulsed bursts of infra-red light (see diagram above). The combination of the HiTechnic V2 Seeker combined with an RCJ-05 Mode-A ball allows much more reliable detection of the soccer ball than mode-B (or the older Wiltronics or RCJ-01 HiTechnic balls). In mode-A, the Seeker Sensor is much less easily distracted by external heat sources near competition arenas.
When using these soccer balls with a HiTechnic V2 Seeker, the Seeker V2 NXT-G control panel option must be set to "AC".

Using the HiTechnic RCJ-05 Soccer Ball in Mode-D.
This mode is the official mode for 2011 World Robot Olympiad GEN II soccer robots. It is similar to Mode-A, except that the "shape" of the infra-red pulses is different (see diagram above). Use of Mode D's different pulse shape results in an RCJ-05 soccer ball in Mode-D being able to be detected more reliably and at a greater distance by a V2 Seeker than is possible if Mode A is used.
When using these soccer balls with a HiTechnic V2 Seeker, the Seeker NXT-G control panel option must be set to "AC".
Using the HiTechnic RCJ-05 Soccer Ball in Mode-C.
In human soccer, it is possible for two teams to practice at opposite ends of a soccer field without interfering with each other, because each use their own ball. I'm told the original idea of Modes C and D was that robot soccer players could have the same advantage. The Seeker V2 sensor could distinguish between Mode C and D RCJ-05 robot soccer balls. Thus having two balls on the same field would not necessarily be confusing to soccer robots, as each soccer robot could tell which ball they were meant to use.
Althought we hear rumours of progress, currently (May2011) the use of RCJ-05 Mode-C is not implemented in NXT-G, so we will not talk about mode-C any more.
HiTechnic RCJ-01 to RCJ-04 Soccer Ball specification sheet.
Wiltronics Mark 2 Soccer Ball specification sheet.
To return to the Soccer Ball page, click here.
DrGraeme.net - Family Fun With Robotics - LEGO NXT MindStorms - NXT-G - Robot Gen II Soccer step 3a - Robot Soccer Balls - Technical discussion.