Mentor Notes- Challenge 60 Neanderthal Food Foraging
Summary: These notes have four sections. The first provides a link to a version of this Neanderthal Food Foraging lesson in Microsoft Word 2003 format. The second provides some Internet links to background information relating to Neanderthals. The third provides links on approaches to teaching the Food Forager robot how to behave. The fourth provides background information on the materials used to construct the Neanderthal Food Forager Arena.
Neanderthal Food Forager Lesson – 3-page format
You can access a three-page version of this Neanderthal Food Forager lesson in Microsoft Word 2003 format by left-mouse clicking here. This version will take a little less paper than printing out the Web format of this lesson.
Neanderthal History
The Kids encyclopaedia has an article on Neanderthals at http://encyclopedia.kids.net.au/page/ne/Neanderthal . A source of background information of what is thought to be the Neanderthal lifestyle can be seen at the BBC website http://www.bbc.co.uk/sn/prehistoric_life/human/human_evolution/ice_people1.shtml . A linked website has the controversial suggestion that the Neanderthals were victims of global warming; see http://www.bbc.co.uk/sn/tvradio/programmes/horizon/neanderthal_prog_summary.shtml Also, since one of our Challenges is related to bull-fighting, I can’t resist point you to a site that suggests that the Neanderthals originated bull-fighting! – See http://www.asa3.org/archive/asa/200003/0253.html . There is also far more detail about neanderthals than you are ever likely to need (unless you are really interested) at http://en.wikipedia.org/wiki/Neanderthal .
Teaching your Neanderthal Robot
There are several approaches that are useful when you are looking at teaching Neanderthal Robots how to behave.
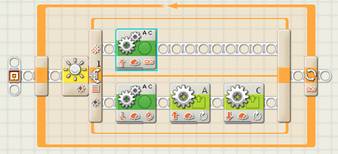
NXT-G: The main approach, and the approach suggested by LEGO as being the easiest to learn, is to teach your Robot how to behave using the NXT-G language.
1) NXT-G Summary: This Challenge is not an easy one. There are many strategies your students can employ to teach their Neanderthals how to collect food points. By this stage, most students will probably have enough experience to choose their own approach, but for those who are uncertain, some the following approaches could be discussed.
2)
Calibrate.
To get maximum food points, your Neanderthals will need to stay within the arena. To do this they could use a light sensor pointed downwards. Using light sensors from the NXT 1.0 kits, the readings I get from the arena I have constructed (yours will vary) are:
|
Colour |
Light Sensor Reading |
|
White |
61 |
|
Light Blue |
47 |
|
Dark Blue |
36 |
|
Black |
30 |
3)
“Bull in the Ring” approaches.
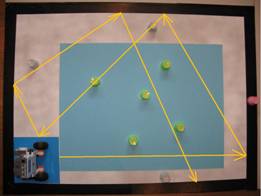
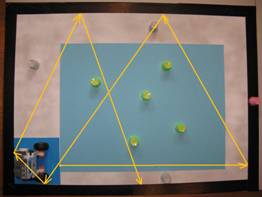
3.1) Strategy 1. The Neanderthals could just bounce around the forest, hoping to collide with berries and collect food points. Staying within the light blue area [sensor decision value = (61+47)/2=54] is a safe strategy and would give them a maximum of 5 berry food points.
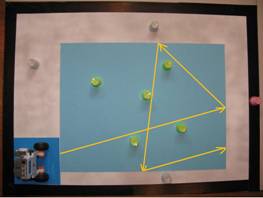
3.2) Strategy 2. Staying within the white area could give them a maximum of 6 fish food points. Possible sensor decision points are (61+47)/2=54 and (61+30)/2=45 or 46. Your student will probably (after thought) choose either 45 or 46. Why? A value of 46 (or 45) will allow the Neanderthal to bounce off both the light blue and black edges of the stream.
3.3) Strategy 3. Another strategy could be to use a dark blue/light blue light sensor decision point, with the student’s Neanderthal collecting a possible maximum number of 11 berry and fish food points. The decision point would be [(47+36)/2=41 or 42; either would be fine, but for the convenience of the following discussion, let us choose 42]. For the decision point of 42, everything darker than 42 (dark blue and black) will cause a bounce, and anything lighter than 42 (light blue and white) will be ignored.
3.4) Strategy 4. Your student could
also choose a decision point of black/dark blue. This will be risky
in the case of my arena (it may be OK with yours). It is risky
because the decision point [(36+30)/2=33] is very close to either of
the limiting (black/dark blue) values, being only 3 from each –
generally about 5 or more gives a reasonably reliable separation. If
the Forager bounces at all, thus moving the light sensor nearer or
further away from the surface, the light sensor reading could vary
by almost this amount just because of the bounce, rather than
because of a change of colour of the surface under the light sensor.
Also since there is no food within the dark blue home area there
seems to be little advantage in this strategy –
at first glance.
3.5) Strategy 5. This is essentially the same as strategy 3 or 4, with the addition of an ultrasonic (sonar) sensor used to find the food items directly. The only advantage over strategies 3 & 4 is that this approach will almost certainly save some time if it is implemented effectively; (for example, have a look at the videos of the student’s “Bull in the Ring” videos on this web site – Miss Neilson’s students employed sonar and Mrs. Airey’s didn’t – the former strategy resulted in a faster clearing of the ring).
4)
Bringing the Food home.
All of the strategies so far have relied solely on the Neanderthal Robot bumping into food items – there has so far been no attempt to bring food back to the tribe hungrily waiting in the dark blue home square. The reason that this has so far been impossible for all strategies (except variations of strategy 4) is because all of these strategies prevent the Neanderthal from re-entering the home square.
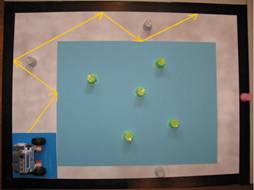
4.1) Strategy 6. If an imitation Neanderthal robot using strategy 4 has some sort of V-shaped collector in front of it, any food items it will have collected will be carried in front of it, and will be “dumped” at the black cliff edge of the arena when it backs away from the cliff edge. If the cliff edge happens to be behind the home square, double points will be obtained as those food items will be available to feed the famished relatives in the home area. Most of the food items, however, will be left uselessly around the cliff edge away from the home square.
4.2) Strategy 7. Strategies that ensure the food gets back to the home square are generally not simple. One suggested strategy would be to go around the arena bouncing off the sides (using strategies 3 or 4) until a touch sensor or ultrasonic (sonar) sensor in the front of the imitation Neanderthal Robot registered that the Robot had collected an item of food. This would trigger a change in behaviour so that the next time the Robot found a cliff edge, it changed its behaviour into that of a line follower, and followed the edge of the cliff until it detected the home square. Its behaviour would then change again to the “bounce off the cliff edges” behaviour where it backed away from the edge (thus leaving the food in the home square to be eaten by the rest of the family), and returned to its former behaviour of looking for food by bouncing off the edges (strategies 3 or 4) just as it started out doing. It would keep alternating between these two behaviours until it ran out of time.
Adding an ultrasonic (sonar) sensor to strategy 7 would make the gathering of food points very rapid. Perhaps there would then be time to add a third form of behaviour - edge-following the cliff and using an extension arm to collect the honey - may also be a possibility.
Implementation of Strategy 7 with these extensions is very unlikely to be able to be completed in a 2-hour session. Whether you as mentor decide to have this as a multiple-session Challenge, or truncate it after 2 hours is up to you. Do what is best for your class – you are the one who knows the best course of action to aid your student’s education.
Enjoy leading this Challenge – it should be very interesting to see the various ways your students tackle it!
5) Addendum to NXT-G Notes:Experience gained with this Challenge has suggested a few changes that may be beneficial.
5.1) With the short time limit of 2 minutes, students mostly aimed at gathering berry bushes and ignored the fish and honey – perhaps reducing the number of berry bushes from 5 to 3 would be a good idea, to encourage making an attempt at the more difficult food items a more desirable option.
5.2) An alternative would be to experiment with a larger arena. I can’t do this for the thoroughly practical reason that, if I have a bigger arena, it won’t fit in my car as I go from school to school! However a bigger arena would make the distance detection limits of the light and ultrasonic sensors a bigger factor, and would also make the search strategy chosen a bigger factor.
5.3) Another alternative would be to lengthen the run time from 2 minutes. The classes I work with generally have about 24 to 30 students, so can have up to 15 teams (although 10 is more usual) – hence a run time longer than 2 minutes is impossible to fit into a 2 hour time slot. However if you have a smaller number of groups, or a longer time to complete the Challenge, allowing a longer run-time limit could give a greater benefit to teams employing clever strategies… Interesting! All good fun!
RoboLab: The older approach, previously used by LEGO, is to use RoboLab. This works for both the present LEGO NXT and the older LEGO RCX robots. It is icon-based, like NXT-G, is generally regarded as being harder to learn than NXT-G (but within the capabilities of Grade 5 & 6 students). It currently has the advantage of providing faster responses than NXT-G. Mentor notes are not currently available for using RoboLab for Challenge 60, Neanderthal Food Foraging, but may be made available if there is a demand for them.
RobotC: The other main approach is to use RobotC. This is a text-based computer language, being generally regarded as being more appropriate for higher levels of secondary school, perhaps grades 9 & 10. It offers the fastest response of any of these three languages, but is the more difficult to learn. Mentor notes are not currently available for using RobotC for Challenge 60, Neanderthal Food Foraging, but may be made available if there is a demand for them.
Construction of the Neanderthal Food Foraging Arena
Uses: This Arena is used only for the Neanderthal Food Forager Challenge (Challenge 60).
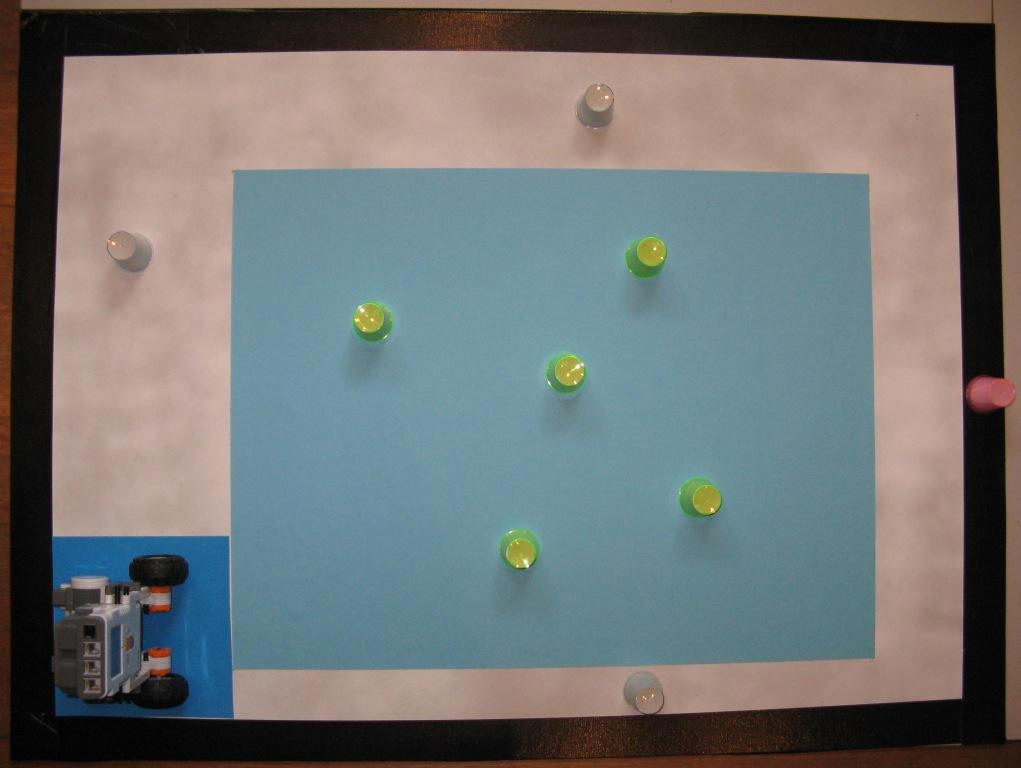
Construction: I used a straw board [see footnote [1] below] sprayed with matt white paint [2] rimmed with black cloth tape [3]. The light blue [4] and medium blue [5] areas of the arena are coloured light cardboard sheets glued (somewhat unsatisfactorily) with UHU stic glue [6].
This gave NXT Kit 1.0 light sensor calibration readings of about 61 for the white areas, 47 for the light blue, 36 for the medium blue, and 30 for the black tape, (the values you obtain for your arena will almost certainly differ). We have observed that a value difference of about 10 between the observed light values gives reliable and repeatable runs. This value of 31 is only just enough to reliably separate the four "colours" (actually "shades") seen by the imitation Neanderthal's light sensor.

If you decide to make an arena, also get a mask (see illustration above) from the chemist’s or similar shop to use when you spray-paint the strawboard, so that you do not breath in spray paint particles, (these particles can’t be good for your lungs).
The "food items" were small plastic cups [7]. These were too light to trip the touch sensors, so I filled them with Plaster of Paris [8].
Other options? The original suggestion from Carnegie-Mellon University (see link in the “About” section of this web site) was for a 3 feet by 3 feet arena. This size proved difficult to find in a form that was a reasonable price (that is, as dirt cheap as possible!) The strawboard was a the best substitute I could find, 1050 mm by 800 mm (3 feet 5 inches by 2 feet 7 inches). A hint- don’t use a gloss paint on this board – I tried a gloss red and it was absorbed very patchily - the board looked as if it had measles – ugh!
Regarding a substitute for the strawboard, if you have a tip shop near you, then it is worth a look as these recycling centres at the local refuse dump as they can be a rich source of really cheap material. Other centres that recycle building material could also be worth checking. If these do not prove successful, your next bet could be a building material supplier.
If you have facilities for chopping up large sheets of building material (I haven’t) you could look at material like an MDF white backing sheet 2400 mm by 1200 mm (6 feet 10 inches by 3 feet 11 inches) [9]. An ordinary 3mm MDF board of the same size is about 2/3 the cost of the white-surfaced MDF board, but you would have to factor in the price of the paint to get a matt white surface for your arena. Which way to go? - Up to you…
Good luck with your fossicking!
Obtainable Where?
The following information is included to provide an idea about price & availability - it is not intended to be a recommendation for any particular commercial institution. The prices were current at the end of 2008.
[1] The straw board was obtained from an Art supplies Store; (in my case “Artery”, Collins Street, Hobart, Tasmania $4.95).
[2] The matt white spray can paint was obtained from a "remainder" store; (in my case Chickenfeed, Hobart, Tasmania, $3:00; enough for treating two strawboard sides)
[3] The 48 mm. wide (approx. 2 inches) self-adhesive black cloth tape was obtained from a hardware store, (in my case Kemp & Denning, Hobart, Tasmania, $2.16 for a 4.5 metre (approximately 5 yards) roll).
[4] The light blue cardboard sheet can be obtained from an Office Supplies shop or an Art Goods supplier; (in my case Officeworks had a limited selection of colours and sizes at $1:38 each, Artery had a much more extensive selection of colours and sizes, at prices ranging from $2.10 to $2.56). The NXT Kit 1.0 light sensors respond most strongly in the infra-red region, which is fine for rattlesnakes, but doesn't help me much when I'm at a shop trying to predict the colour's response to a light sensor. It may be worth getting several sheets of varying tones of blue, as (if you are like me) I find it difficult to predict the likely light sensor reading by just looking at the colour - blues give a lower reading than I would normally expect, and reds a much higher reading.
[5] The medium blue cardboard sheet can be obtained from an Office Supplies shop or an Art Goods supplier; (in my case Officeworks had a limited selection of colours and sizes at $1:38 each, Artery had a much more extensive selection of colours and sizes, at prices ranging from $2.10 to $2.56). As already commented under [4], it may be worth getting several sheets of varying tones of blue because of the difficulty of predicting the likely light sensor reading.
[6] I was not at all impressed by the UHU Stic glue. You may be better at using this than I was, but in my case it needed to be applied thickly to cause any adhesion. When applied thickly it came out in lumps that were not easy to flatten. It also seemed to be more difficult to get it to adhere in the blue sheet corners than other methods I have used. I also had to use a complete 21 g tube on this one arena. I won't use it again. Next time I will go back to using double-sided transparent plastic tape - which I found much easier and cheaper to use, and which was very easy to handle when sticking down corners.
[7] These small plastic cups (approximately 40mm by 40 mm, 1½ inches by 1½ inches) were obtained from the local "remainders" store (in my case, Chickenfeed, Hobart, Tasmania, $2:00 for 40 cups). In practice, these were too small to be easily handled by the NXT robots, bigger cups would have been better.
[8] Plaster of Paris was obtained from a hardware store; (in my case Kemp & Denning, Hobart, Tasmania, $4.49 for 1 kilogram (2 ¼ pounds), which was about 4 or 5 times more than I needed).
[9] The 3 mm MDF white backing sheet mentioned above can probably be obtained from a hardware store; (in my case I saw it in stock at Kemp & Denning, Hobart, Tasmania, for $19).