Challenge 24 – Edge Following – Line
Following.
Summary: Following a line
is a classic challenge in robot engineering. Robots are often
equipped with one, two, three or more light sensors to enable them
to follow a line. In Challenge 24 we look at the task of following a
line with a robot that uses only one light sensor. If you look at
the Challenge 24 student videos, you will notice that the robots
shown using one light sensor are not actually following a line, they
are actually following a light/dark edge.
The way the robot follows a light/dark edge is
to oscillate between the dark and light sides of the edge of the
line, advancing a little further forward with each oscillation.
In this note we look at NXT-G programs that
will allow a robot to follow the edge of a line, and a way of
changing the programme so that it follows the opposite side/edge of
the line.
Following An Edge Using
NXT-G.
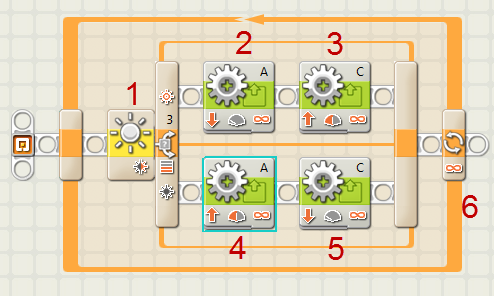
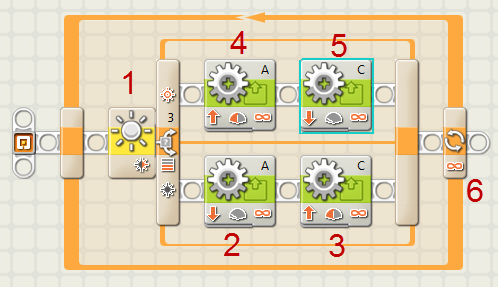
The following NXT-G program will allow a one-light sensor robot like ClareBot to follow the edge of a line. If you are using DomaBot with the light sensor attached at the end of the robot that has the swivel wheel, the directions of all four motor blocks (shown in the diagrams below) should be reversed.
The calibration values for light and the motor speeds
shown in the diagrams below worked quite well on my version of
ClareBot in a typical classroom. However these light and motor values will
almost certainly have to be adjusted so that the motor speeds fit
your robot, and the light values are appropriate for the light in
your classroom.
 1
1
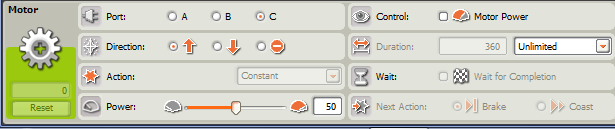
The
DrGraeme.net video “Reminder” between Challenges 24 and 26
demonstrates how to calculate your substitute for the “50” value
shown in the diagram above. If your room is very brightly lit, the
value to you calculate will probably be above 50. If your room is
relatively dim, a value lower than 50 is likely to be appropriate.
 2
2
 3
3
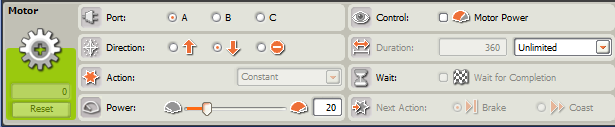
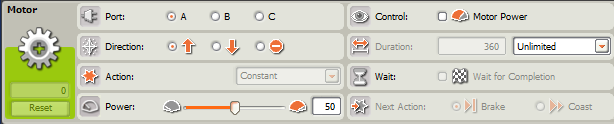
In the
two diagrams above, and the two diagrams below, the motor speed of
20 backwards, and 50 forwards, allowed my version of
ClareBot to
follow edges with quite sharp bends. You should experiment with
these speeds, as it is likely the your robot will need different
motor speeds, depending on the size of the wheels attached to your
robot, and the sharpness of the turns of the edge of the line that
is being followed by your robot.
If the
curves of the line are very gentle, a forward speed of 70, and a
“backwards” speed of 0 (zero) may work. If your robot has to
navigate the end of a line, returning on the other side of the line,
values such as 40 forwards and 30 backwards may be necessary to
prevent the robot losing the end of the line. Experiment!
 4
4
 5
5
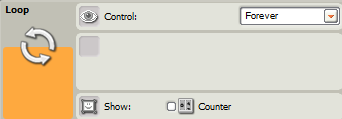
Keep
things simple - set the loop to “Forever”.
 6
6
You can
now download the program into your robot, and try the program out.
Problems?
- If your robot is going backwards, reverse the directions of all four of the motor commands 2,3,4,5.
- If the robot has problems following the edge of the line, try starting it on the other side of the line.
-
If
the robot spins around in circles, the calibration of your light
sensor is probably wrong. Go to the “Reminder” in DrGraeme.net
between Challenges 24 and 26 to find out how to calibrate your
light sensor.
-
If
the calibration of your light sensor is correct and there are
still problems, check to see if your
robot’s light sensor can move or wobble. Moving, pivoting,
wobbling or insecure light sensors will be impossible to
calibrate accurately – re-build your robot so that your robot’s
light sensor is secure and does not wobble.
-
The
gap between the bottom of your robot’s LEGO light sensor and the
floor, should be about half to three-quarters of a centimetre
(about 3/16 to ¼ of an inch). Too close, and the light sensor
will have trouble telling the dark and light portions of the
line apart. Too far away, and the robot will be easily
distracted by stray light from around the room.
Following the other side of the line.
There
are times when you may prefer your robot to follow the opposite edge
or side of the line. You can achieve this by swapping the top
and bottom lines of the code (see the code below, and compare it to
the code at the top of this web page).
Following the line using more than one light sensor.
If your robot is entered in a competition, the
speed at which the robot follows the edge of the line may be
important. Some additional speed may be gained by adjusting the
motor speeds. However, more speed can be gained by using two light
sensors and a more complicated NXT-G program. Check out
Challenge
102 in DrGraeme.net for an outline of a method for using two light
sensors when following a line.
Edge Following. - Tutorial 24 - NXT-G - Mentor Teacher notes - LEGO MindStorms NXT - www.DrGraeme.net