
How-To videos (2:30) Windows, Phone, iPad, iPhone, Fire, YouTube.
Click on pictures to enlarge.
![]()

![]()


![]()

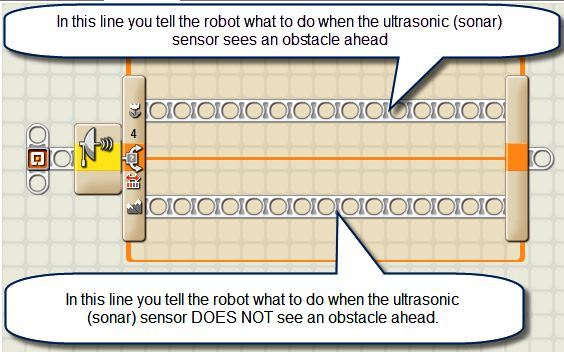
One of the common things we want our robot to do when it sees an obstacle some distance ahead, is to try to avoid the obstacle by turning, and then go forwards again. Let us look at how we can tell our Robot to do this.
1A) We want our Robot to go forwards while using the Sonar Sensor. [Video Big Small]
1B) How do we tell our Robot to go forwards while using the Sonar Sensor? [Video Big Small]

1C) What does our Robot do when we try out the 1B instructions? [Video Big Small]
2A) We want our Robot to turn after seeing an obstacle. [Video Big Small]
2B) How do we tell our Robot to turn after seeing an obstacle? [Video Big Small]
2C) What does our Robot do when we try out the 2B instructions? [Video Big Small]
4) Can Robots go around obstacle courses? [Video coming soon]
www.DrGraeme.net - Adding an Ultrasonic (Sonar) Sensor to ClareBot - Copyright Dr. Graeme Faulkner 2010