Compasses and Robot Soccer
In Robot Soccer it is useful for your robot to be able to tell the direction to both your goal and your opponent’s goal. A compass can help your robot do this.
There are two kinds of compass available for your NXT robot, Wiltronics compasses and HiTechnic compasses. We will use the latter, as LEGO has approved them for use with the NXT robots.
1. What does a HiTechnic Compass Sensor Do?
The HiTechnic Compass Sensor contains a digital magnetic compass that measures the earth’s magnetic field and calculates a compass bearing to the nearest 1° . It can report a compass bearing to an NXT robot 100 times per second.

2. Building a HiTechnic Compass Sensor on to your Robot.
The HiTechnic compass sensor will only operate correctly in a horizontal position, so you must keep the compass level for it to read correctly. This is very important. Please remember this when you building the compass sensor into your robot.

It is also highly desirable to mount the compass at least 15 cm. (6 inches) away from the motors and 10 cm. (4 inches) away from the NXT computer brick itself. This is necessary because both the NXT computer brick and NXT motors produce magnetic fields that can change the compass sensor readings.
In the picture to the left, you can see the compass sensor is mounted high, well above both the motors and computer brick.
3. Using the HiTechnic Compass Sensor with NXT-G
To use the compass sensor from NXT-G, an
additional piece of software needs to have been added to your computer. To
see if your copy of the NXT-G software has been upgraded, start up NXT-G,
start up a program, & check the
 menu.
Does it contain a
menu.
Does it contain a
![]() option?
If it does, you can use a compass with your robot. If it does not, it will be
necessary for you to arrange that your software be upgraded before you can
use the compass sensor.
option?
If it does, you can use a compass with your robot. If it does not, it will be
necessary for you to arrange that your software be upgraded before you can
use the compass sensor.
If your copy of NXT-G has been upgraded, construct the following program. The program aims to let you see the compass reading on your NXT’s screen.
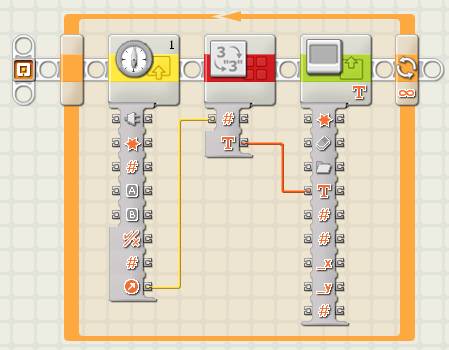
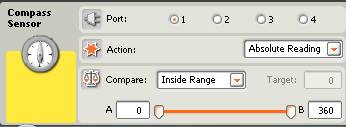
Set up the compass control block (left of the three blocks above) to look like this:
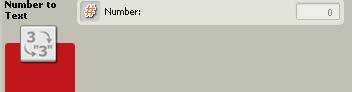
The “Number to Text” control block (middle of the three blocks above) should look like this:
The Display block (the rightmost of the three blocks in the NXT-G diagram on the previous page) should be adjusted to look like this:

Now when you download this program to your NXT and run it, you will see a number displayed on your NXT’s small computer screen; this number (between zero and 360⁰) is the compass heading.
Move your robot around, and notice how the reading changes. Experiment and see if the reading changes when the compass sensor is tilted one way or another. Do you have to be quite careful to keep the sensor horizontal, or does this not matter?
4. Which is the direction of your opponent’s Soccer goal?
How does the Compass Control Block work?
Suppose you used the program on page 2 of these notes, and found out that the compass directions of the two edges of your opponent’s goal were 90 and 100 degrees. Now also suppose that the compass control block in your program was set up like the one below.

If your robot was in a game and saw the compass readings of either 90 degrees, or 100 degrees, the compass control block would behave as in the following table:
|
A |
B |
Range |
Absolute Reading |
Compass Block True or False? |
|
85 |
95 |
Inside Range |
90 |
True |
|
85 |
95 |
Inside Range |
100 |
False |
|
85 |
95 |
Outside Range |
90 |
False |
|
85 |
95 |
Outside Range |
100 |
True |
Using the Compass block in your Soccer Program.
Use the program on page 2 of these notes to find out the compass headings for the two edges of your opponent’s goal. Write them down so you don’t forget them. Now if you used the “Inside Range” option in your program to see if your robot is pointed at your opponent’s goal, you could then program your robot similarly to the program at the top of the next page. Note that, while in this program it is assumed that the compass is connected to sensor slot 2, any of the sensor slots 1, 2, 3 or 4 can be used.
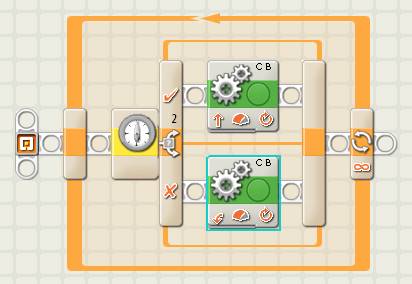
A compass sensor control block like the one below would tell your robot to obey the top line of your program if the compass reading is inside the range 90 to 180.

In the example program above, the top line of the program would tell the robot to go forward if it is facing in the direction of your opponent’s goal (that is, if the compass reading is inside the range 90 to 180 degrees). If the robot is not pointing at the opponent’s goal, (that is, the compass reading is outside the range of 90 to 180 degrees) it will spin around looking for your opponent’s goal.
Soccer Strategy
The program above is one way to program your soccer robot. But is this the only way to arrange your soccer program? Is there a better way to use the compass sensor in your soccer program? What should you do if the ball is between your robot and your opponent’s goal – charge at it? What should you do if the ball is between your robot and your own goal – should you charge at it or do something different?
Tasmania mainly uses the GEN II soccer field (see a diagram of the field by clicking here); for some more information on GEN II soccer (including videos) click here. In a 2007 GEN II soccer workshop in Tasmania, Mr. Brian Thomas gave the following hints:
{kind=link}
Check if you are out of bounds (the mat under you is white) – if you are out of bounds try to return to the soccer field (turn around, go forward, and repeat this until the mat under you is not white and you are back in the soccer field).
Find the soccer ball (spin around until you see the soccer ball, but be careful, too fast a spin and you may miss it).
Go to a good place to kick the ball towards your opponent’s goal (if the soccer ball is between you and your own goal, travel to the other side of the soccer ball so that the soccer ball is between you and your opponent’s goal).
Go to the soccer ball (go fast towards the soccer ball, trying to reach it before your opponent’s robot)
Good luck - enjoy your Robot Soccer!
---------------------------------------------------------------------------------------------------------------
Mentor note: This is also available in a 4-page Microsoft Word 2003 document; click here.